Die ROBODY PARKOUR-Challenge
Vision
Besiege den schnellsten Menschen auf einer aufblasbaren Parkour-Rennstrecke mit einem Roboter.
Sich nähern
- Grundlinie festlegen
- Beginnen Sie mit einer minimal lösbaren Lösung (beliebiger Roboter, in Simulation, harte Strecke)
- Härter machen (beinige Roboter, echte Strecke, weiche Strecke)
- Wiederholen, bis die Sicht erreicht ist.
Ein ehrgeiziges Ziel
Wir alle träumen davon, mehr Zeit zu haben: Zeit zum Reisen und Erkunden, Zeit zum Lesen und Lernen, Zeit, um unsere Kinder zu unterrichten und von unseren Kindern unterrichten zu lassen, und wir träumen von einer Auszeit – von den alltäglichen, langweiligen Aufgaben, die uns daran hindern werden, wer wir wirklich als Mensch sein sollen. Die Aufgabe der Robotik besteht darin, all dies zu ermöglichen, aber die Fortschritte in der Robotik sind langsam – Roboter bleiben teuer und ein vielversprechendes Roboter-Startup nach dem anderen stirbt, einfach weil das Beste, was wir bauen können, nicht genug Wert bietet – Roboter sind es einfach nicht fähig genug. Oder zu langsam … wie wäre es also, Roboter mutiger zu machen?
Wir glauben, dass Roboter genau wie Menschen an den Herausforderungen wachsen, denen sie sich stellen müssen – also ist es Zeit für eine neue Herausforderung. Eine Herausforderung im Sinne der Embodied Intelligence, die wir Menschen locker meistern, aber Roboter versagen – und statische Stabilität ist keine Option:
Die Robo Parkour-Challenge
Sich einer Vision mit einer Herausforderung nähern
Anatomie einer guten Robotik-Herausforderung
Anforderungen
Lösung
Herausforderungsstruktur
Die Herausforderung wurde aufgrund der anhaltenden COVID-19-Pandemie auf unbestimmte Zeit ausgesetzt.
BASISEINRICHTUNG – SEIT 7.9.2019
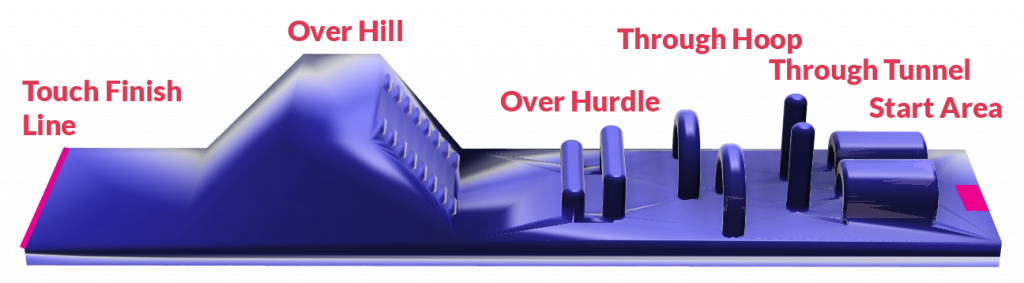
Sammeln von Video-, Timing- und Bewegungsverfolgungsdaten, um eine menschliche Grundleistung zu ermitteln und einen Datensatz dynamischer Interaktion mit der Rennstrecke zu erstellen, mit dem zusätzlichen Ziel, verschiedene Strategien zu verstehen, die von den Teilnehmern verwendet werden, um die Hindernisse zu bewältigen, zwischen Hindernissen und ihrem Kurzschluss zu sequenzieren - und Bewegungs-/Pfadplanung über einen langen Horizont.
Simulationsherausforderung
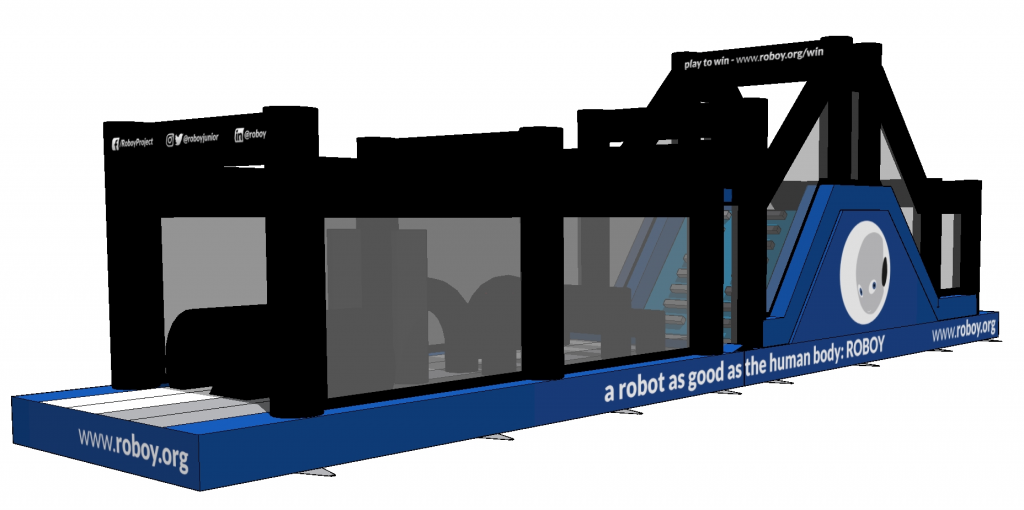
[wp-3dtvl model_file=”/RoboyParkourChallengeTrack-Simplistic-2019-09-19.stl”][/wp-3dtvl]
Bauen Sie anhand des 3D-Modells der Strecke einen simulierten Roboter, der am schnellsten durch die Strecke kommt.
Die „Roboter“ in dieser Simulationsherausforderung bestehen aus einem willkürliche Kombination starrer Formen, mit beliebiger Geometrie, verbunden durch Dreh- oder Kugelgelenke.
Der Roboter und die Simulation müssen den Einschränkungen auf der rechten Seite genügen.
Wertung: Die summierte Zeit der besten 8 von 10 Läufen. Läufe, bei denen der Roboter von der Strecke fällt, werden als gleichwertig mit dem langsamsten Lauf + 10 Sekunden pro Lauf gezählt.
Ressourcen
KÖRPERLICHE HERAUSFORDERUNG
Wenn Sie sich dieser Herausforderung stellen möchten, wenden Sie sich bitte an win@devanthro.com – wir rechnen mit einem frühestmöglichen Start der Herausforderung in Q3/2022.
Häufig gestellte Fragen
Die ersten Läufe richten sich an interessierte Forscher und Labore, um ein grundlegendes Interesse zu schaffen. Später hoffen wir, eine Community rund um diese Herausforderungen aufzubauen, sei es bei fortgeschritteneren Hardware-Herausforderungen für Forschungsgruppen und größere Teams, während Simulationsherausforderungen von einzelnen Forschern, Studententeams oder sogar als Teil von Kursarbeiten abgeschlossen werden können.
Wir haben einen Telegram-Kanal, den wir nutzen, um über das Gewinnspiel zu diskutieren: https://t.me/roboyparkourchallenge
Da die Herausforderung aus einer Reihe sich wiederholender kleinerer Herausforderungen besteht, ist die Metrik für jede Runde anders. Bitte erkundigen Sie sich bei ihren jeweiligen Funden, dass einige gerade jetzt oder in Kürze stattfinden, um zu sehen, wie Sie gewinnen können.
Wir stellen alle Daten zur Verfügung, die unter der Lizenz CC-BY 4.0 aufgezeichnet werden. Daten, die Personen darstellen, werden entweder anonymisiert oder es werden die erforderlichen Formalitäten erledigt, um eine Freigabe zu ermöglichen.
Am wichtigsten ist, dass wir keine Erfahrung mit Robotik haben, aber Menschen sehr gut darin sind. Die traditionelle Art der Robotik besteht darin, die Komplexität so weit wie möglich zu reduzieren – so genannte Laborbedingungen zu schaffen – und dann zu versuchen, sich langsam auf immer komplexere Umgebungen auszudehnen.
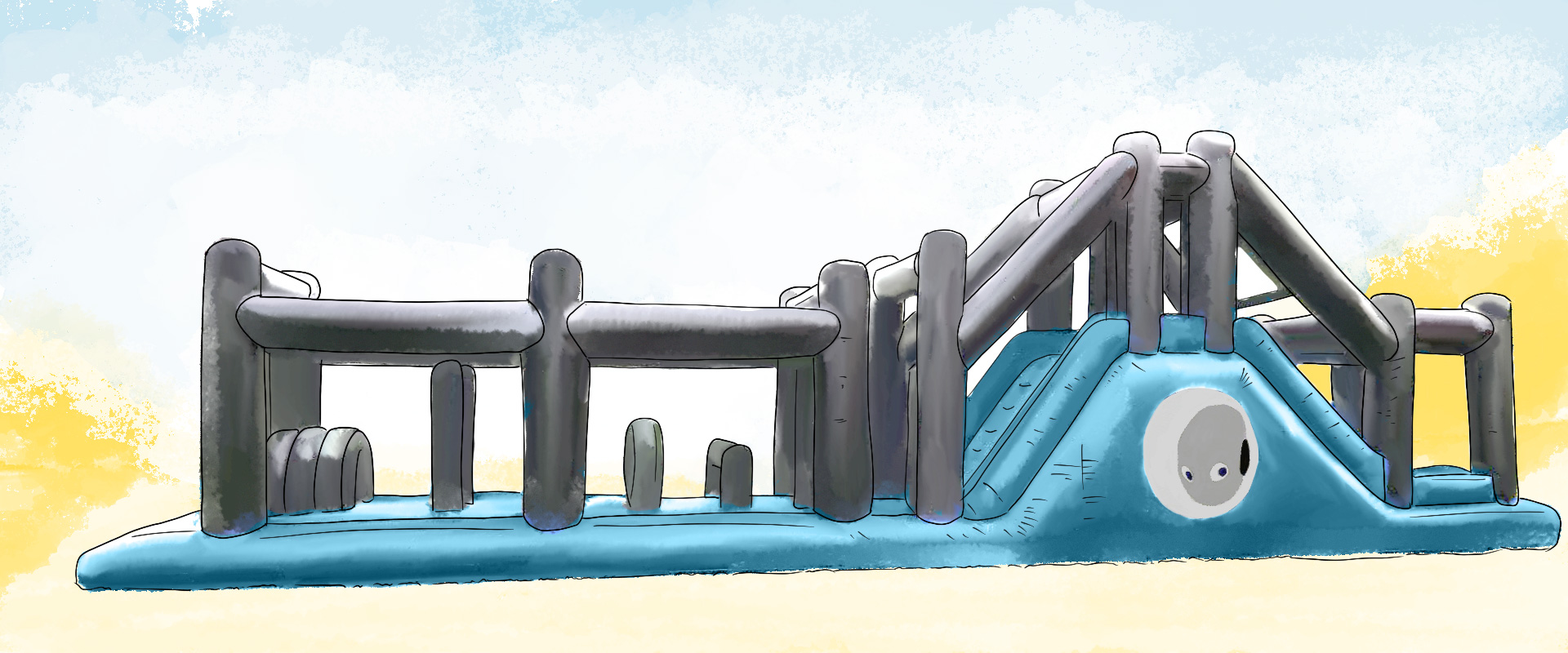
Wir glauben, dass eine wenig erforschte Variable die Robotermorphologie ist. (dh sich ändernde Eigenschaften des Roboterkörpers, einschließlich seiner Morphologie, Kinematik, Betätigung, …), und diese können natürlich nicht unter Laborbedingungen untersucht werden, da das Ergebnis eine Funktion der Umgebung ist. Eine weiche Parkour-Strecke ist der ideale Mittelweg zwischen Laborbedingungen und der realen Welt. Jedes Team kann sich einfach günstig eins kaufen und hat somit identische Konditionen. Aber die weiche Natur macht die Aufgabenstellung variabel und verbietet zu einfache Lösungen!
Die Schienen werden von Viva Inflatables BV in den Niederlanden produziert. Sie können sich entweder direkt an sie wenden oder wir kümmern uns um die Logistik und liefern ein Gleis für 6999 € + MwSt. an Ihre Haustür. Wenn Sie daran interessiert sind, senden Sie uns bitte eine E-Mail an: parkour@devanthro.com
Derzeit stellen wir ein vereinfachtes starres Oberflächenmodell und eine begleitende SDF bereit.
Live-Events
7.9.2019 – Roboy-Finale
19. + 20.9.2019 – IEEE Conference of Cyborgs & Bionic Systems, München
Während der IEEE-Konferenz für Cyborgs und bionische Systemehaben wir den Wettbewerb offiziell der Öffentlichkeit bekannt gegeben.
Wissenschaftlicher Beirat
Der Vorstand wird irgendwann bekannt gegeben.
Sind Sie daran interessiert, diese Zusammenarbeit aus wissenschaftlicher Sicht zu gestalten, um uns dabei zu helfen, das Ziel zu erreichen? Schreiben Sie an parkour@devanthro.com Wir freuen uns, Sie dabei zu haben!